Robotitehnika
Tegemist on põneva ja areneva valdkonnaga.
Juhendatud lõputööd 2020-2025.
Tööstusrobotid
Tänapäeval võimaldavad detailsed kolmemõõtmelised mudelid ja dünaamikamudelid tööstusrobotite tarkvara arendada ja osaliselt katsetada ka ilma füüsilise robotita (off-line programming). Paljude Tallinna Tehnikaülikoolis olemasolevate vanema põlvkonna manipulaatorite kohta on uutes tarkvarapakettides olemas väga detailsed mudelid robotite juhtimistarkvara arenduse lihtsustamiseks.
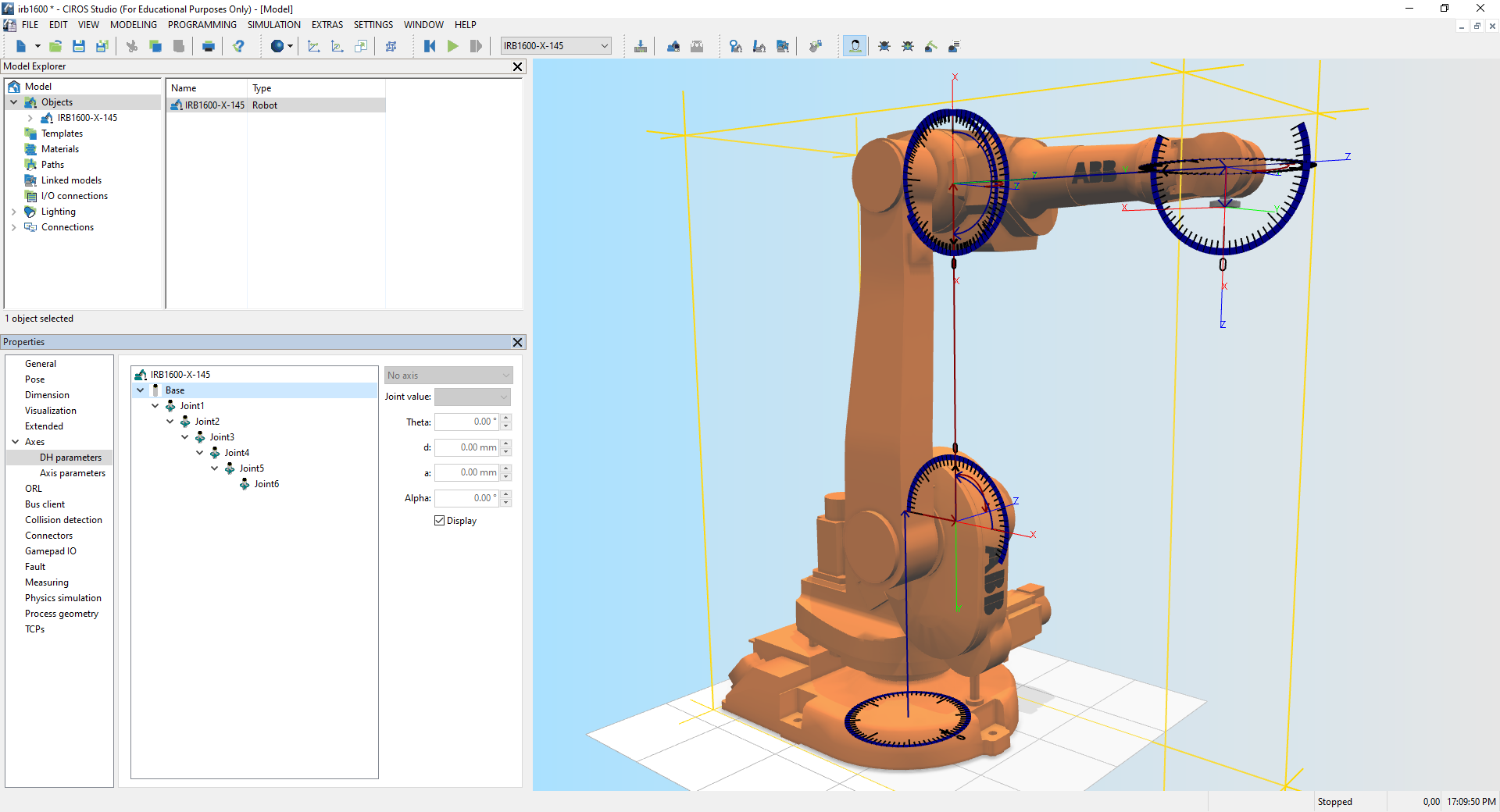
ABB IRB1600-1.45
|
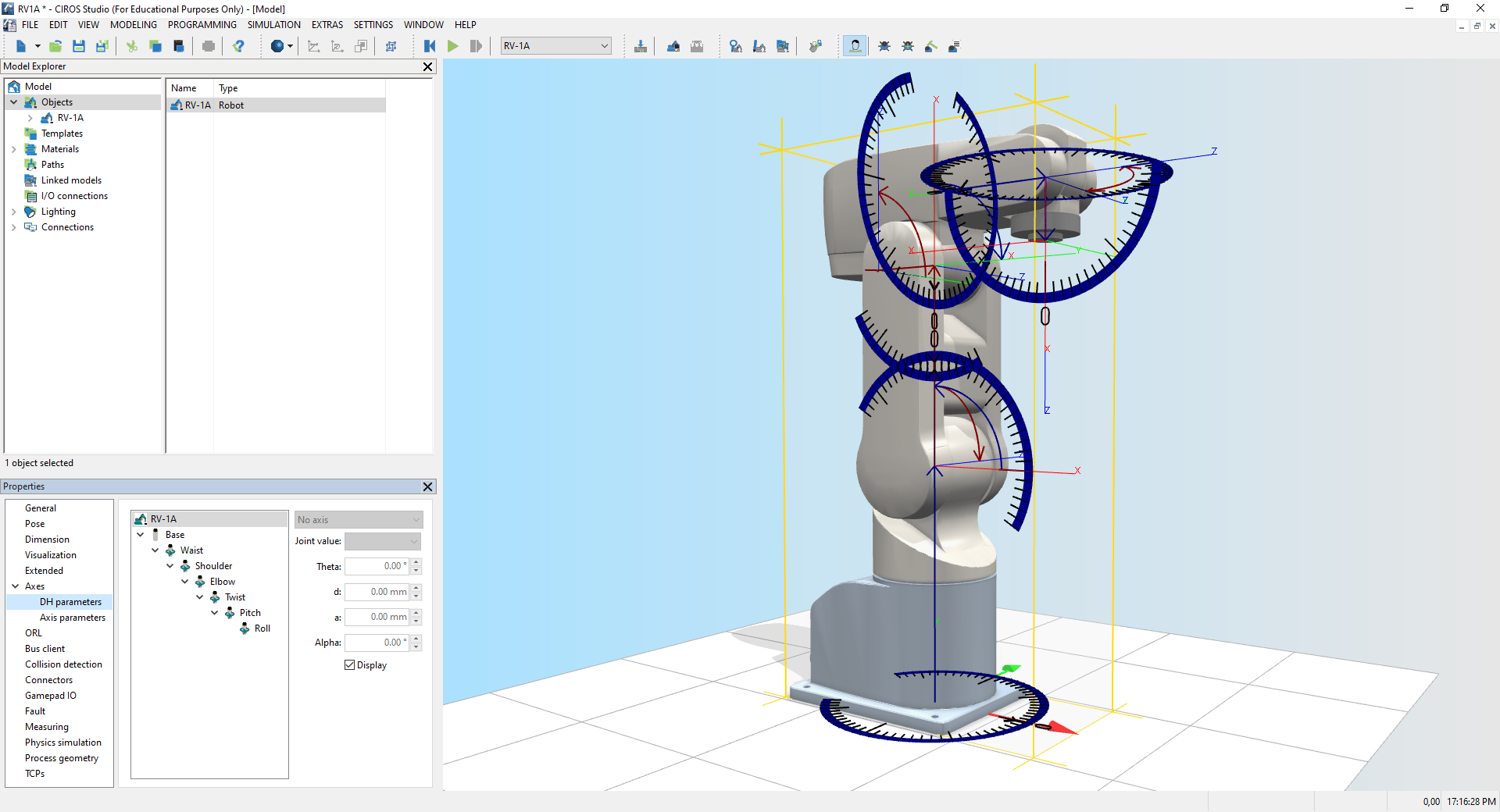
Mitsubishi RV1A
|
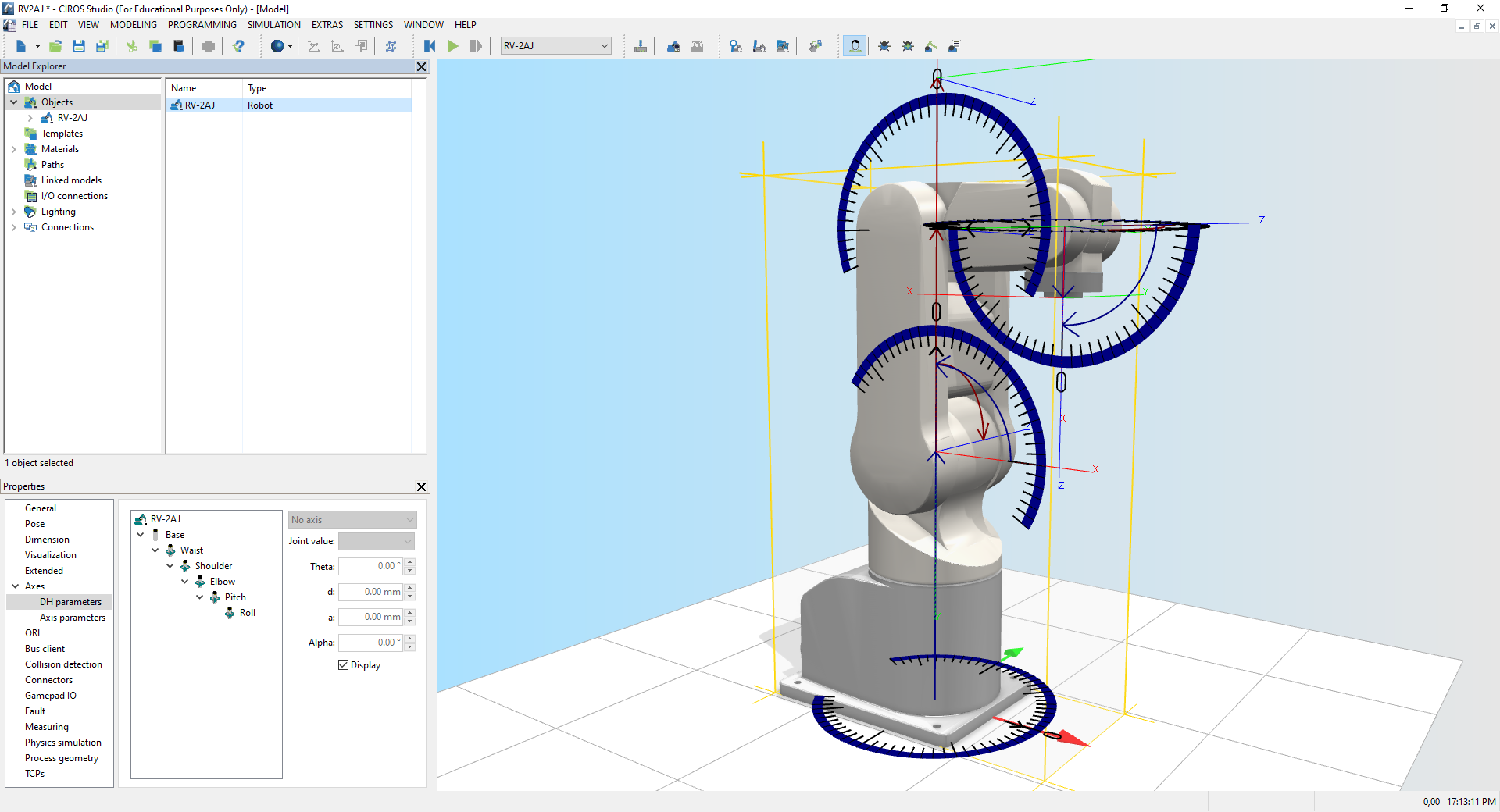
Mitsubishi RV2AJ
|
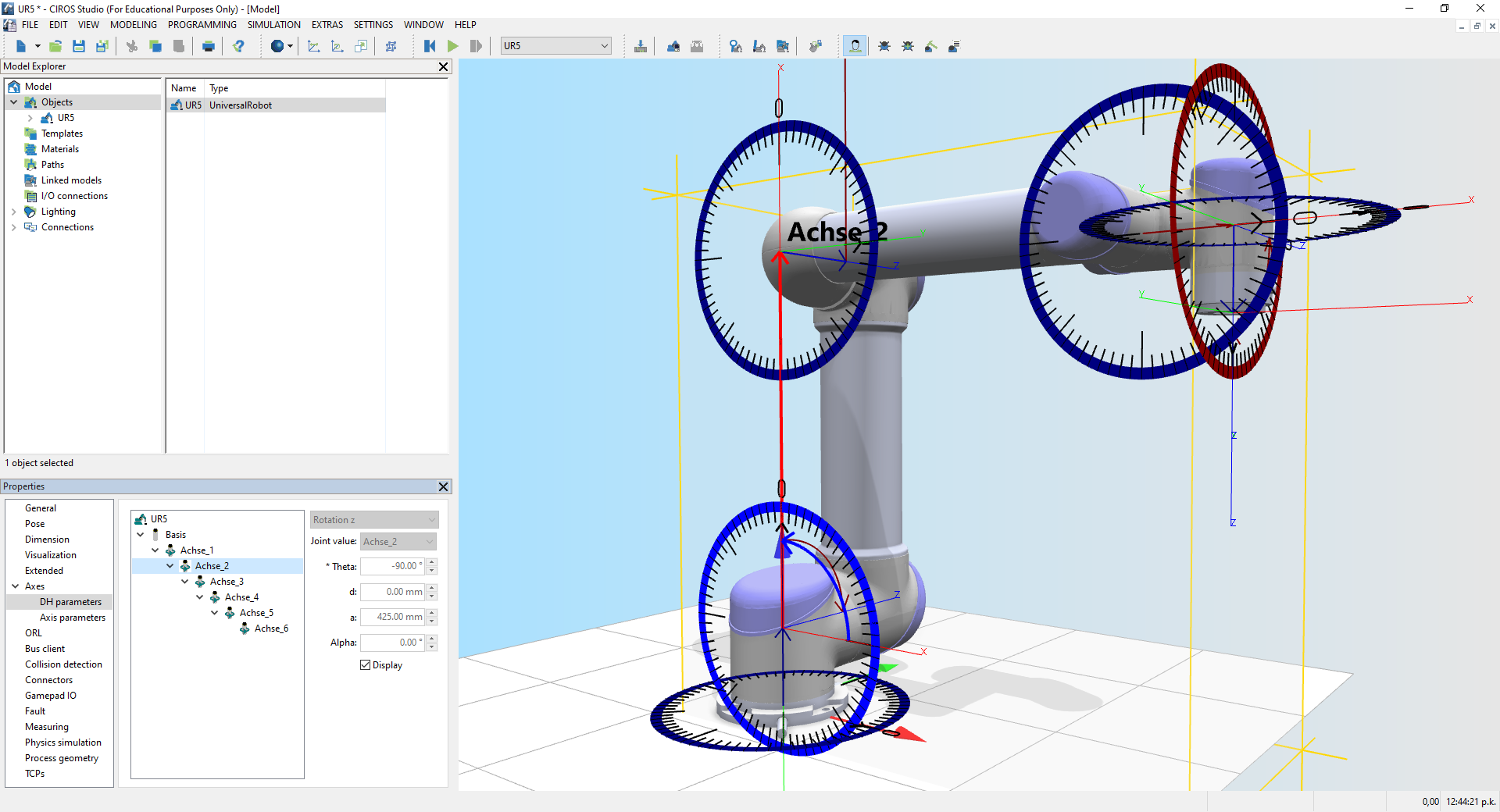
Universal Robots UR5
|
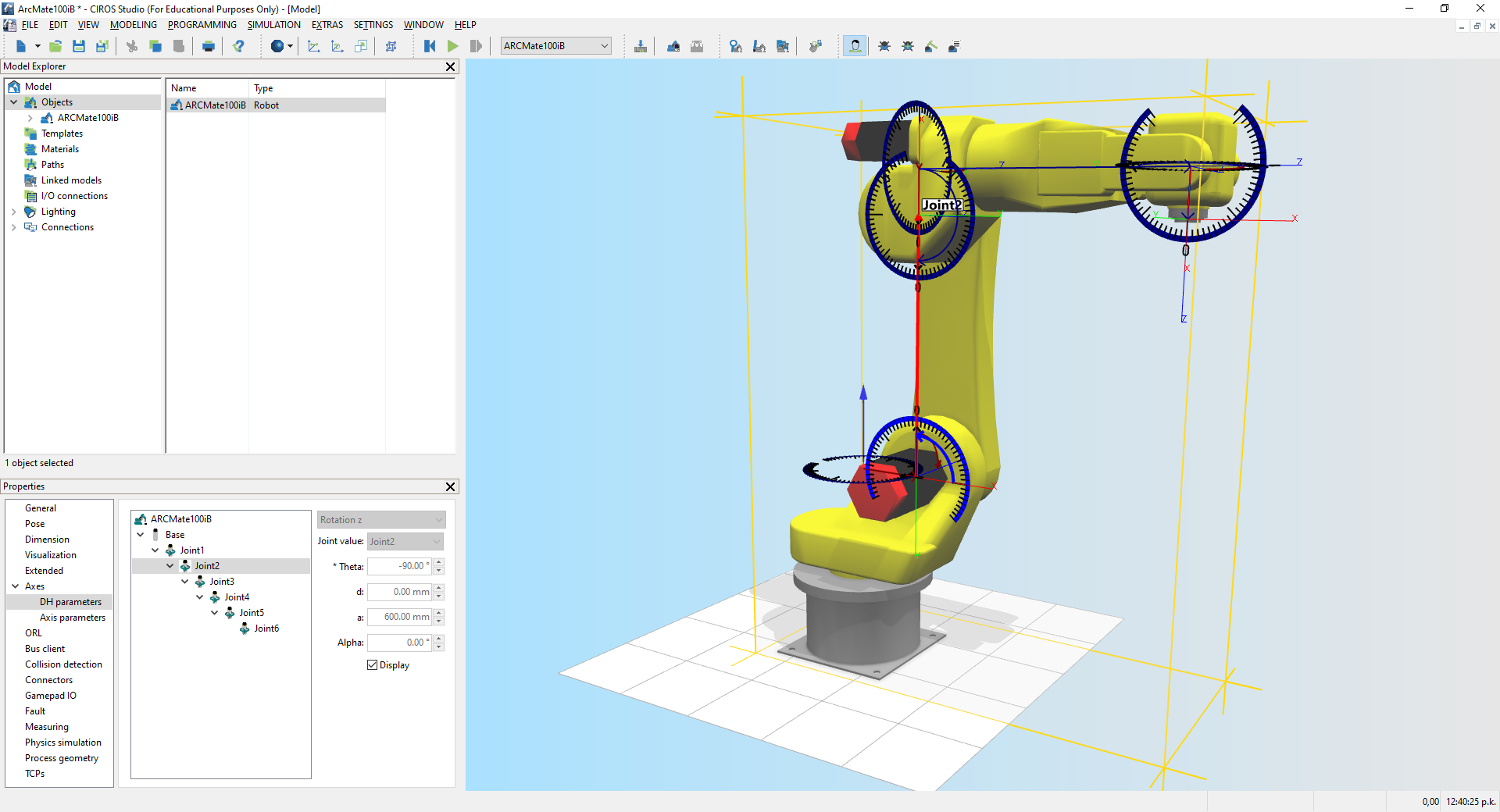
Fanuc ArcMate100iB
|
Liikurrobotite navigatsioonist
2020/2021 õppeaasta sügissemestri lõpus saadeti suur osa kursusest osavõtnutest koroonaviiruse tõttu eneseisolatsiooni.
Tõstatus küsimus, kuidas viia eneseisolatsioonis olijateni loenguplaani järgi kavandatud materjal. Lahenduseks olid videosalvestused auditooriumis.
ABB koostööroboti YuMi manipulaatorite kalibreerimine
Robotite manipulaatorite liigendite asendite täpseks määramiseks kasutatakse inkrementaalsete koodrite (incremental encoder) tüüpi impulsse väljastavaid asendiandureid.
Manipulaatori toite väljalülitamisel jäävad asendiandurid patareitoitele ja jooksvat asendit säilistatakse patareist todetavas kiires muutmälus (RAM). Kui patarei puudub või on tühjaks saanud, siis tuleb manipulaatori liigendeid uuesti kalibreerida.
ABB YuMi manipulaatoritel on kalibreerimiseks kaasas omapärane programm. Kalibreerimisprogrammi käivitamisel kalibreeritakse manipulaatori liigendi asendid liigendite ajamites olevate magnetite ja
Halli tajurite abil.
Viiteid
Madis Lehtla, 2019/2020